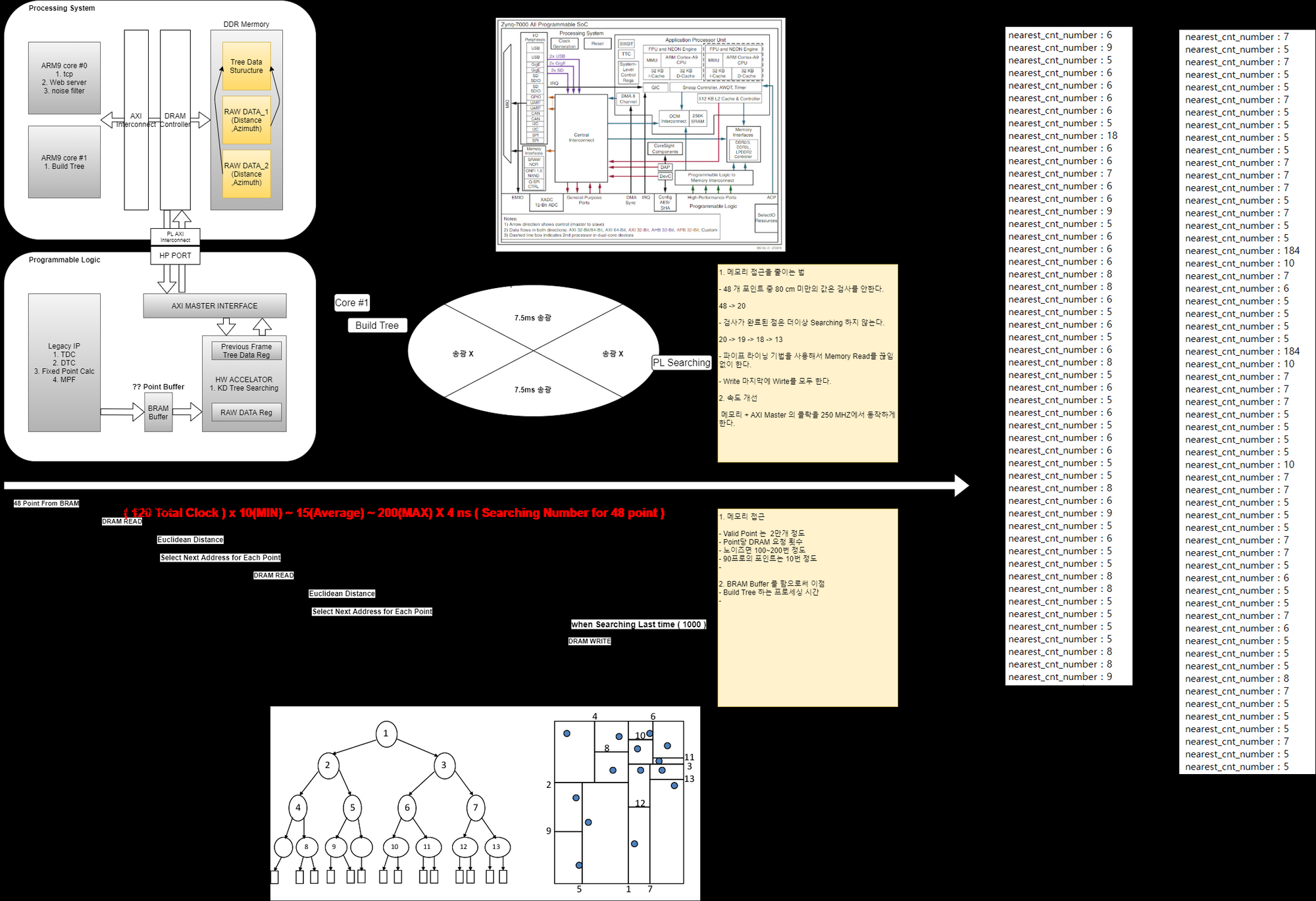
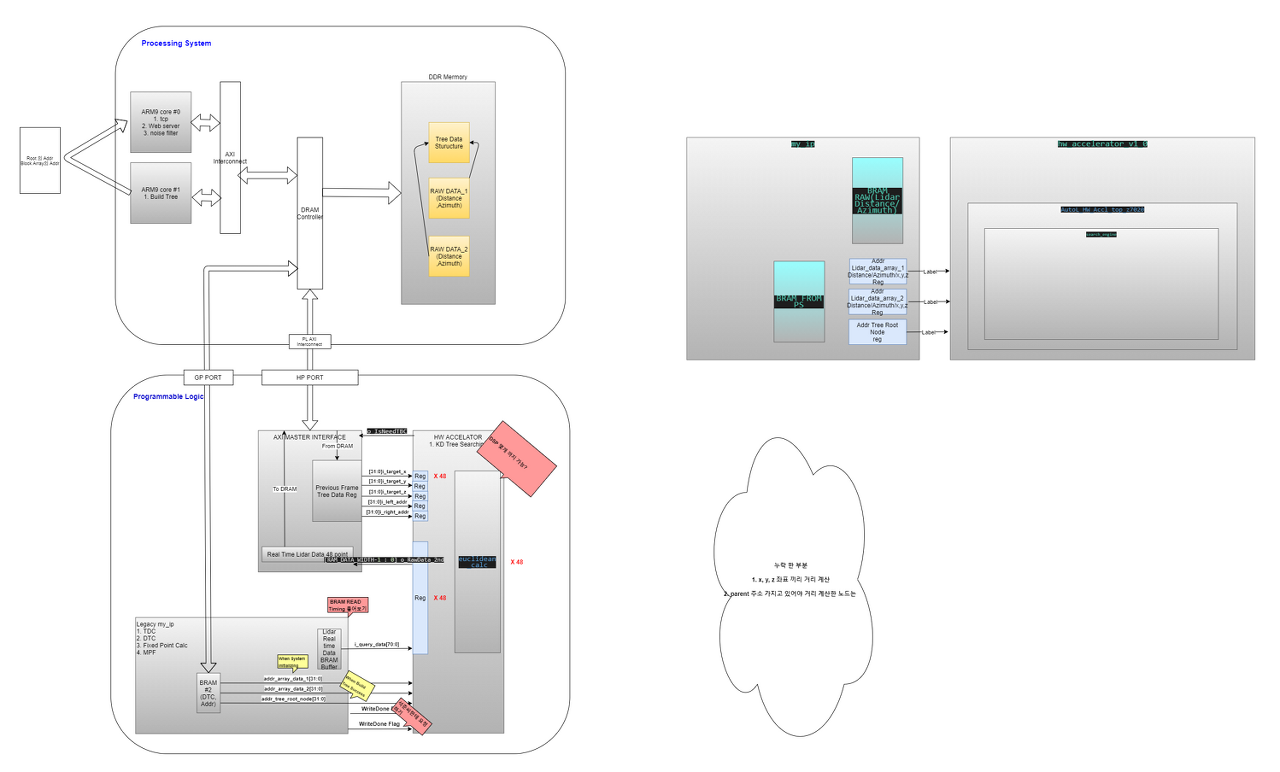
1. 라이다의 모터 회전을 통해서 얻어진 포인트를 xyz 좌표 변환을 하지 않고, 각 포인트의 주변점을 검사함으로써
라이다와의 거리가 특정값 이상이 되면 제거하는 로직 개발
- 장점 :
하나의 Frame 에 대해서만 검사하여 움직이는 물체에 대한 이슈를 고려 안해도 됨.
xyz 좌표로써 포인트간의 거리를 측정하는 것이 아닌 라이다와 포인트간의 거리(이미 가지고 있는 데이터)로 판단하기 때문에 처리 시간이 짧음.
- 단점 :
Noise 두개의 점이 가까운 거리에서 뜨면 제거 하기가 힘듬.
'어플리케이션 > 라이다' 카테고리의 다른 글
| 3D 포인트 K-D Tree 구현 (0) | 2021.09.07 |
|---|